Electro-hydraulic integrated drive-by-wire control system
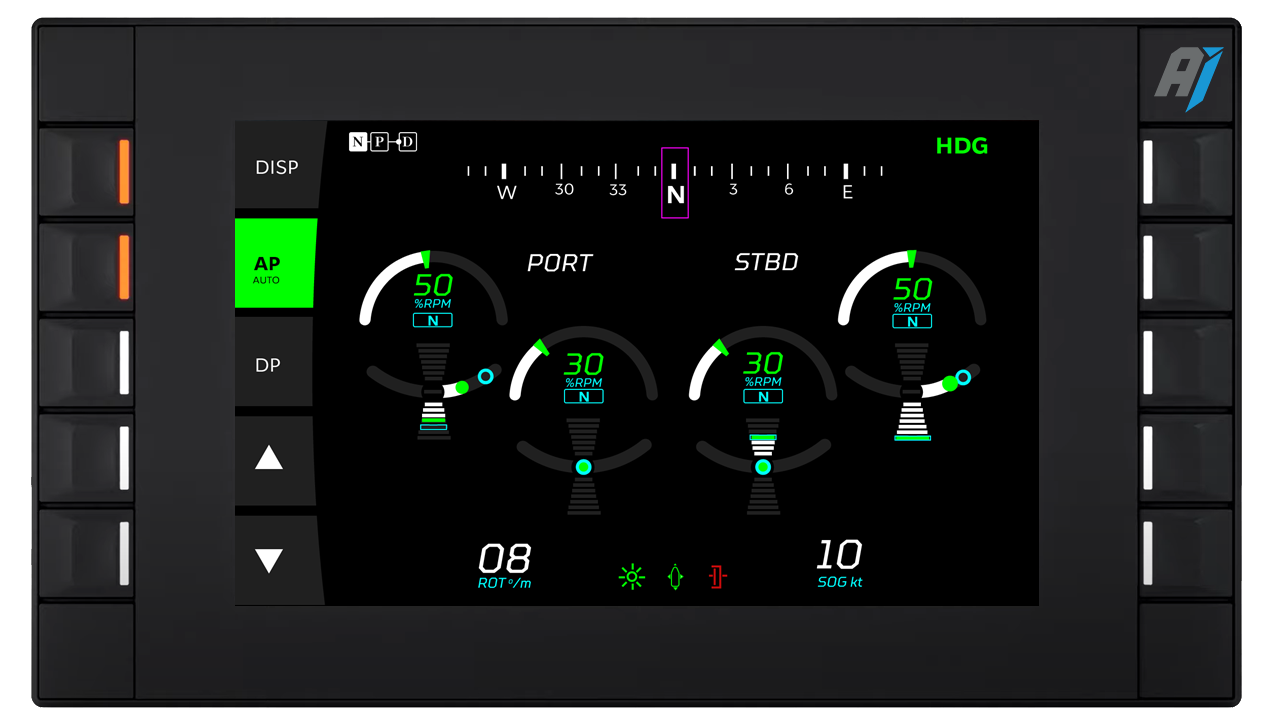
Alamarin-Jet Sigma Control System is an electro-hydraulic integrated drive-by-wire control system.
It supports installations from single to quadruple waterjets. The system is based on modular architecture and the level of features depends of the modules integrated based on the user requirements.
In addition to the standard configuration of Sigma Control System, AJ Intelligent Dynamics is also available as an add-on feature.
AJ Intelligent Dynamics has been developed with future markets and industries at its core, such as effortless and straightforward integration with 3rd party autonomous and unmanned systems.
Intelligent Dynamics also features highly sophisticated virtual anchor, heading hold, course mode and track mode functions which give significant operational benefits to a wide variety of vessel types and applications.



ISO
9001
ISO
14001
ISO
45001
Specifications
Intelligent Dynamic Features
Joystick
Dynamic Positioning (DP)
Virtual Anchor
Autopilot
Support for External Autopilot
EXIF – External Interface (USV)
Joystick
Ideal for docking and low-speed maneuvering in harbor environments, Joystick mode allows the vessel to move precisely in the direction and rotation set by the joystick.
The operator can perform all movements, including lateral, diagonal and rotational maneuvers, using only the joystick.
The system automatically calculates and adjusts the propulsion to execute the requested movements accurately, providing smooth and controlled handling.
Dynamic Positioning (DP)
When DP mode is activated, the system automatically holds the vessel’s GNSS position and heading, keeping it steady in a designated location.
The operator can make precise adjustments to the vessel’s position and heading using the joystick without disengaging DP mode, enabling smooth, controlled movements as needed.
Key Features:
- Maintains set position and heading, counteracting wind, waves, and other external forces.
- Typically requires high RPMs in adverse weather conditions, making it fuel intensive.
- Optimally functions with a twin-jet configuration for enhanced stability and performance. Single-Jet require a bow thruster
Virtual Anchor
Activating Virtual Anchor mode sets a virtual anchor point that the system uses to maintain the vessel’s position within a defined radius, automatically orienting its bow toward the wind for stability.
Instead of a physical anchor, Virtual Anchor relies on GNSS positioning and compass data to hold the vessel in set distance from virtual anchoring point, using precise engine and propulsion adjustments to counteract wind and currents. This allows for fuel-efficient operation at minimal RPM, ensuring smooth, controlled movement.
Virtual Anchor is convenient for the crew, ideal for ROV deployment, and functions effectively even with a single-jet configuration. The system also enables fine-tuning of the anchor point distance while the function is active, helping the vessel to naturally stabilize over time with minimal energy consumption.
Autopilot
Heading Hold: Maintains the vessel on a set heading, allowing for natural drift caused by wind and currents. The locked heading is easy to adjust on the fly, reducing user workload and offering intuitive control.
Course Mode: An advanced version of Heading Hold, Course Mode creates a course for the vessel to follow. In this mode, the vessel actively maintains its course, preventing any drift.
Track Mode: Designed for use with an external navigation planner (ECDIS), Track Mode enables the Sigma autopilot to follow a pre-defined route with waypoints. Once a route is activated, the autopilot automatically steers the vessel along the planned path.
Support for External Autopilot
In addition to its built-in Sigma autopilot, the system includes an interface that allows compatibility with external autopilot systems
EXIF – External Interface
USV Ready – Provides a comprehensive CAN bus JET-Control interface with engine management, enabling rapid deployment for Unmanned Surface Vehicles (USVs). EXIF includes essential methods to control the system via an external CAN bus node, and allows access to Sigma’s higher-level controls, such as Joystick mode.
Contact us for more information
If you want to learn more about this or our other models for your particular specifications and application, we are here to help you.